2010年12月25日
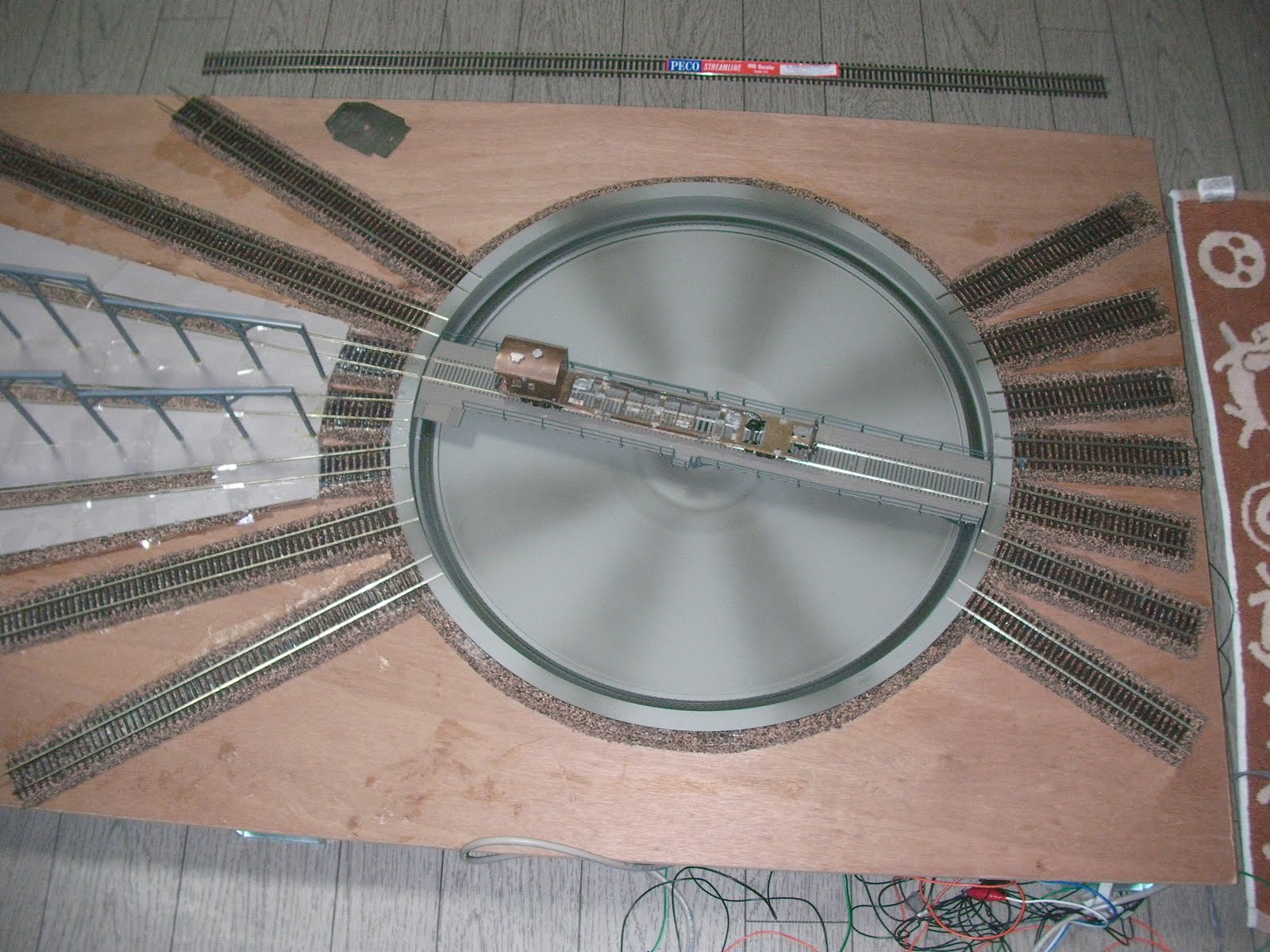
試運転してみました!
弊社,志賀鉄道の新レイアウトで試運転してみました。若干問題はありましたが修正して,何とかメイン路線での走行は出来るようになりました。このあとWYE部で大問題が発生しました。詳細は後日のご報告となります。
弊社ブログにご興味持ってお読みくださり有難うございました。
皆様にお読みいただいた今年の弊社ブログTOP3は:
1.転車台シリーズ
2.PCでの自動運転ソフト編,ハード編シリーズ
3.アメリカの鉄道模型シリーズ
でした。
ありがとうございました。
皆様,良いお年をお迎え下さい。
Merry Christmas !!!

皆様 弊社名誉会長のPeace君から,サンタの衣装で”Merry Christmas !!!”をお届けします。プロフィールの写真も変更しました。お楽しみ下さい。
2010年12月19日
ロープウェイ


写真にあるロープウェイも駅から駅へと動きます。長年かかって,良くぞ!ここまで作りこまれたと脱帽です。お楽しみ下さい。これでアメリカシリーズは完結となります。
次回からは,引き続き弊社の志賀鉄道(滋賀県の志賀という場所に工房があることから,こう名付けました。)の技術とレイアウトをご紹介して参ります。
アメリカ鉄道の動画(最終)
いかにもメルヘンティックなジオラマです。レイアウトは200ヘーべのお部屋に一杯です。電灯の点くお家があり,転車台があり,ロープウェイもあり,まわりにはフィギュアが飾られています。その一端をご紹介しました。
アメリカの(多分)Gゲージ動画編2
アメリカの動画2です。軌間距離を測って来なかったことが悔やまれます。Gゲージのメーカは今でも沢山ありますが,3.5インチゲージはありませんので,すべて自作となります。動画は短いですがそれなりにお楽しみいただけると思います。
アメリカの3.5(G?)ゲージ動画編
動画が再度アップできるようになりました。アメリカの3.5インチゲージと思ってご紹介してきましたが,Gゲージの間違いだったかも知れません。いずれにしても,大きな模型は迫力がすごいです。動画の最後に映っている方がオーナーです。お楽しみ下さい。
2010年12月18日
もうすぐお正月です!
弊社,志賀鉄道は全面的な変更を行うことにしました。理由ですが,1)転車台システムを床から60ミリ持ち上げたこと 2)そのため旧来のお座敷レイアウト(床直おき)と接続できないこと 3)長い編成を,そのまま方向転換したいこと などから,最新写真のように,大改造中です。 ポイントの数も4個から7個に変わりましたし,自動で運転する部分と,手動でする部分の混在で,やっていこうと考えました。 今後徐々にご説明して参ります。
皆様が弊社ブログを数多く見てくださっていることに,深謝いたします。ご意見,ご質問をご遠慮なく,弊社メールアドレスまでお寄せ下さい。
support@peace-company-llc.com
皆様,よいお年をお迎え下さい。

皆様が弊社ブログを数多く見てくださっていることに,深謝いたします。ご意見,ご質問をご遠慮なく,弊社メールアドレスまでお寄せ下さい。
support@peace-company-llc.com
皆様,よいお年をお迎え下さい。

2010年11月30日
転車台 コントロールボックスの配線

転車台を制御するコントロールBOXの配線をしました。結構大変でしたが,出来ました。この電源には市販のパワーパックと速度制御パックを繋いで使います。転車台ブリッジの回転動力にも使います。アプローチ線路,ブリッジ線路,サービス線路の極性と速度を合わせるのは,頭の訓練のように大変です。
閑話休題5 M4シャーマン戦車

この写真は,ラジコン制御のM4シャーマン戦車の模型です。1975年にTAMIYAから購入したもので,いまはプレミアムが付く貴重品のようです。32センチの大きさがあり,子供達を車に乗せて引っ張る力があります。今でもサスペンションはしっかり動きます。左右の動輪には,クラッチメカニズムで動力を伝えます。信地旋回はできますが,超信地旋回は出来ません。
2010年11月29日
アメリカの3.5インチゲージ2(最終)


アメリカ 3.5インチ シリーズの最終版です。 Gゲージでも充分迫力はありますが,3.5インチは軌道間隔が89ミリあり,アメリカ豪邸でないと屋内では楽しめません。
2010年11月27日
閑話休題4 アメリカの豪邸

アメリカに旅行したとき,友人の豪邸を訪問しました。ここはサンディエゴです。丘の上に住まいするのが,豪邸のステイタスのようです。
3.5インチ鉄道模型の動画を準備しているのですが,ブログにアップできなくなったようです。申し訳ありません。
2010年10月31日
アメリカの 3.5インチゲージ1(修正しました)


アメリカ サンディエゴにお住まいの3.5インチゲージファンのお宅を訪問しました。何回かの連載で写真と動画をお届けします。鉄道模型の資産だけで,数億円だそうです。このフロアは200平方メートルあります。お楽しみください。
2010年10月10日
PCで自動運転 その37!ソフト編10(ポイント制御2)
下記のサンプルコードは,QKeyで定義したクイックキーを使ってポイントを動作させる例です。
最初の3行では,表示しているQKeyテーブルのSwitch_1の表示の上でマウスを左クリックすると,レイアウト上の位置(12,2,1)に表示しているポイントの形を切替表示に変えるとともに,物理的にSwitch 1を動作させるソフトです。
4行目からの3行では,逆に表示とポイント自身を動かして,元の位置に戻すものです。
Switch 2に関しても同じように制御できます。
When Switch_1=Left
Do switch1=ON,
$Switch(12,2,1)=ON
When Switch_1=Right
Do switch1=OFF,
$Switch(12,2,1)=OFF
When Switch_2=Left
Do switch2=ON,
$Switch(14,4,1)=ON
When Switch_2=Right
Do switch2=OFF,
$Switch(14,4,1)=OFF
これは,PCから手動でポイントを動かすためのソフトです。
最初の3行では,表示しているQKeyテーブルのSwitch_1の表示の上でマウスを左クリックすると,レイアウト上の位置(12,2,1)に表示しているポイントの形を切替表示に変えるとともに,物理的にSwitch 1を動作させるソフトです。
4行目からの3行では,逆に表示とポイント自身を動かして,元の位置に戻すものです。
Switch 2に関しても同じように制御できます。
When Switch_1=Left
Do switch1=ON,
$Switch(12,2,1)=ON
When Switch_1=Right
Do switch1=OFF,
$Switch(12,2,1)=OFF
When Switch_2=Left
Do switch2=ON,
$Switch(14,4,1)=ON
When Switch_2=Right
Do switch2=OFF,
$Switch(14,4,1)=OFF
これは,PCから手動でポイントを動かすためのソフトです。
PCで自動運転 その36!ソフト編9(ポイント制御)
PC上に表示したレイアウトのポイント部を,左クリックで切替する場合と,右クリックで戻す動作をアプリケーションで作成します。
下記のサンプルコードをご覧ください。
マウスをグリッド(12,2,1)または(14,4,1)の位置で,左クリックしたときには,レイアウト上のポイントの表示を切り替えた状態に変えると同時に,Switch 1と Switch 2をONして,物理的なポイントを動作させます(サンプルコード1段目から5段目まで)。
ポイントを元に戻すには,マウスを同じ位置で,右クリックすると,レイアウト上のポイント表示が戻り,さらに Switch 1とSwitch 2がOFFされて,ポイントが元の位置に戻ります(サンプルコード6段目から10段目まで)。
*ポイントを切り替える
When $Left_Mouse=(12,2,1) OR $Left_Mouse=(14,4,1)
Do $Switch(12,2,1)=ON,
$Switch(14,4,1)=ON,
switch1=ON,
switch2=ON
*ポイントを戻す
When $Right_Mouse=(12,2,1) OR $Right_Mouse=(14,4,1)
Do $Switch(12,2,1)=OFF,
$Switch(14,4,1)=OFF,
switch1=OFF,
switch2=OFF
マウスの位置は,ソフトが自動的に検出してくれますので,その座標をアプリに挿入するだけで,簡単です。
下記のサンプルコードをご覧ください。
マウスをグリッド(12,2,1)または(14,4,1)の位置で,左クリックしたときには,レイアウト上のポイントの表示を切り替えた状態に変えると同時に,Switch 1と Switch 2をONして,物理的なポイントを動作させます(サンプルコード1段目から5段目まで)。
ポイントを元に戻すには,マウスを同じ位置で,右クリックすると,レイアウト上のポイント表示が戻り,さらに Switch 1とSwitch 2がOFFされて,ポイントが元の位置に戻ります(サンプルコード6段目から10段目まで)。
*ポイントを切り替える
When $Left_Mouse=(12,2,1) OR $Left_Mouse=(14,4,1)
Do $Switch(12,2,1)=ON,
$Switch(14,4,1)=ON,
switch1=ON,
switch2=ON
*ポイントを戻す
When $Right_Mouse=(12,2,1) OR $Right_Mouse=(14,4,1)
Do $Switch(12,2,1)=OFF,
$Switch(14,4,1)=OFF,
switch1=OFF,
switch2=OFF
マウスの位置は,ソフトが自動的に検出してくれますので,その座標をアプリに挿入するだけで,簡単です。
2010年9月29日
営業時間の変更
お客様各位
弊社は,2010年10月1日より,営業時間を下記のとおりに変更させていただきます。
月曜日~金曜日: 10:00~17:00
土曜日,日曜日 : 定休日
祝日 : 休業
メールでのお問合せは,24時間365日承っておりますが,ご回答は営業時間内となります。
引き続きご愛顧のほどよろしくお願い申し上げます。
弊社は,2010年10月1日より,営業時間を下記のとおりに変更させていただきます。
月曜日~金曜日: 10:00~17:00
土曜日,日曜日 : 定休日
祝日 : 休業
メールでのお問合せは,24時間365日承っておりますが,ご回答は営業時間内となります。
引き続きご愛顧のほどよろしくお願い申し上げます。
2010年8月30日
PCで自動運転 その35!ソフト編8(速度制御モジュール)
走行する編成の速度を制御するには、”速度制御モジュール”を導入すると便利です。レール電圧を100段階のステップで速度を設定できます。アプリケーションから自由に、場面に合わせた臨機応変な設定が可能です。
速度制御モジュールは、下記のように定義します。
SmartCabs:Power
これは、"Power"と名付けた速度制御モジュールをシステムに定義するものです。2つ以上でも名前を付けて登録できます。実際の速度の設定は、アプリケーションソフトで、自由に設定できますし、いくらでも場面に合わせて変更できます。
編成の慣性度、ブレーキで停車させること、正逆切り替えも指定できます。1つのメイン路線に複数編成を、衝突なしに自動運転することも可能です。(Cab Controlと言います。)
速度制御モジュールは、下記のように定義します。
SmartCabs:Power
これは、"Power"と名付けた速度制御モジュールをシステムに定義するものです。2つ以上でも名前を付けて登録できます。実際の速度の設定は、アプリケーションソフトで、自由に設定できますし、いくらでも場面に合わせて変更できます。
編成の慣性度、ブレーキで停車させること、正逆切り替えも指定できます。1つのメイン路線に複数編成を、衝突なしに自動運転することも可能です。(Cab Controlと言います。)
PCで自動運転 その34!ソフト編7(制御と監視)
今回は、制御とセンサーの定義の仕方をご説明します。
サンプルーコードをご覧ください。
Controls:spare,spare,switch1,switch2,switch3,switch4,spare,spare
Sensors:station_in*~,spare,spare,spare
west#,east#,spare,spare
"Controls"では、システムのループに接続された制御リレーの定義をします。ここではポイントの切り替え回路を接続したポートの位置に従って、定義しています。具体的には、1番目のリレー回路のポート3(ポイント1)、ポート4(ポイント2)、2番目のリレー回路のポート1(ポイント3)、ポート2(ポイント4)を定義しています。使っていないポートは、"spare"と設定します。
"Sensors"では、システムに接続されたセンサーの定義をします。センサーは、使用するセンサーに合わせて、論理の反転や、レールの汚れ検知補正などを設定します。ここでは、透過型フォトセンサー、電流検知器(走行が西向きか東向きかを検知)を定義しています。使用していないセンサーポートは、"spare"と設定します。簡単です。
サンプルーコードをご覧ください。
Controls:spare,spare,switch1,switch2,switch3,switch4,spare,spare
Sensors:station_in*~,spare,spare,spare
west#,east#,spare,spare
"Controls"では、システムのループに接続された制御リレーの定義をします。ここではポイントの切り替え回路を接続したポートの位置に従って、定義しています。具体的には、1番目のリレー回路のポート3(ポイント1)、ポート4(ポイント2)、2番目のリレー回路のポート1(ポイント3)、ポート2(ポイント4)を定義しています。使っていないポートは、"spare"と設定します。
"Sensors"では、システムに接続されたセンサーの定義をします。センサーは、使用するセンサーに合わせて、論理の反転や、レールの汚れ検知補正などを設定します。ここでは、透過型フォトセンサー、電流検知器(走行が西向きか東向きかを検知)を定義しています。使用していないセンサーポートは、"spare"と設定します。簡単です。
2010年8月8日
閑話休題3


琵琶湖湖西北部に箱館山というのがあり、ゆり園が山上にあります。今はお花の最盛期です。遠くに琵琶湖が望めます。写真をお楽しみください。
http://www.hakodateyama.com/index.html
2010年8月6日
PCで自動運転 その33!ソフト編6(変数2)
変数は、代数式で計算し、新しい値にできます。たとえば周回一回する度に、+1するとか、他の値と加減乗除することができます。乱数を使ってモジュロ2で余りを求め、コインの表裏の選択にも使えます。また現在時刻を使って、(例えば)15分単位に通勤列車を発車する時刻ダイア運転にも使えます。周回中の編成を、指定の周回数に至る前に、強制的に次の駅で停車を指示する事ができます。アプリケーションには必須のアイテムですので、活用されると運転の幅が拡がります。
2010年8月5日
PCで自動運転 その32!ソフト編5(変数)
今回は、”変数”をご紹介します。変数は、周回した回数、内線/外線の入れ替え指示、乱数処理、駅で停車させる指示、などなどアプリケーションが走っているときに、変化していくデータとしてアプリに取り込ますことができます。Qkeysから変数の内容を変更することも出来ます。
下記のサンプルコードは、定義の仕方の例です。ここでは、11個の変数を定義しています。
Variables:inside,outside,stop_in,stop_out,should_stop,trackchange,station_out,every,coin,speed_high,speed_low
下記のサンプルコードは、定義の仕方の例です。ここでは、11個の変数を定義しています。
Variables:inside,outside,stop_in,stop_out,should_stop,trackchange,station_out,every,coin,speed_high,speed_low
2010年7月18日
PCで自動運転 その31!ソフト編4(Qkeys)

アプリケーション定義の一部に、Qkeys(Quick keys)というのがあります。これは写真のようにPC画面上に、マウスでクリックするだけで、走行、停止、ポイント操作ができるシステムです。弊社の例では、下記のように定義しました。”Start"は出発進行で、ソフトで作成した走行パターンで自動運転が開始します。"FR"は前進と後退を手動で設定切り替えできます。"Change"は走行路線を内線と外線を切り替えます。"Switch"はポイントのON/OFFを手動で設定できます。"Stop"は、次に駅に到着したら、強制的に停車させるものです。
定義文は、下記のようにします。
Qkeys:Start,FR,Change,Switch_1,Switch_2,Switch_3,Switch_4,stop
転車台 コントロールBOX

先の転車台配線図に従い、コントロールBOXを作りました。写真左には転車台システムに付属のコントローラを配置し、右にはサービス線路、アプローチ線路の正/逆/OFFを選択するトグルスィッチ群を取り付けました。転車台の位置決めにはコントローラを使い、機関車の出入りにはトグルスィッチとの組み合わせで動かします。電源の極性を合わせるには、結構頭を使います。これだけで1日遊べます。
2010年7月2日
PCで自動運転 その30! ソフト編3(定義)

まず始めに,システムを定義してアプリケーションに教える必要があります。センサー,速度モジュール,リレーモジュールなど,ご自分の鉄道模型制御システムに接続されているものを全部,個別にご自分の名前を付けて定義します。未使用分は"Spare"として確保しておきます。
例えば,TBrain(センサー/リレーモジュール)1個,速度モジュール1個のシステムとすれば:
センサーとコントロール,速度モジュールは個別に定義します。写真に定義の一部をお見せします。それぞれの名前は自分で決められますが,定義の順番でハードのどれを使うかが決定します。これらはゲージに依存しませんので,N,HO,O他どんなゲージでもご利用いただけます。
転車台の制御

転車台は位置決めがポイントです。 キット含めて色々な市販品がありますが,ゼロ位置調整はセンサー精度に掛かっています。弊社の転車台は,毎回少しずれる傾向が有りますので,手動で微調整できるようにしました。コントロールBOXは,トグルスイッチ群と,転車台の制御ユニットの組み合わせとしました。アプローチ線路にはメイン線路から機関車が進入してきますので,ギャップを設け,一旦転車台ブリッジ前で停止し,アプローチ線路をメインと切り離し,ブリッジ電源を使います。写真の接続図をご覧ください。
2010年6月26日
閑話休題2!あじさい



名古屋の南にある、”なばなの里”を訪れました。あじさいが50種類、70,000株もあり、梅雨に濡れて満開でした。あじさいの花言葉は、”移り気”(日本で命名)とか、”辛抱強い愛情”(フランスで命名)とか言われています。少し離れたところに長島スパーランドがあり、お子様大好きなアンパンマンミュージアムもあります。パン工場もあります。1日楽しめます。写真をお楽しみ下さい。
2010年6月21日
転車台 機関車を収納してみました!

サービス線路が沢山出来ましたので、弊社機関車群を整列させてみました。結構迫力があります。左クリックすると、画像が拡大されます。次はコントロールボックスを作って配線する作業です。そのまえに自動運転システムとどう(自動、手動など)接続するかを考えて、このコントロールボックスを設計します。
2010年6月17日
PCで自動運転 その29!ソフト編2(使用言語)

”アプリケーションソフトをご自分で開発する”ことでPCによる監視制御と自動運転が出来ます。でも”ソフトを自分で開発するの?”、”出来そうもない!”と思われるかもしれません。でも大丈夫です。まずソフト開発に使う使用言語ですが、英語的ではありますが、専用に用意された言語で、C言語などのように難しいものではありません。
何かが起こると(例えば、駅のセンサーがONする とか)、それに基づいて実行する事を定義します。例えば駅で編成を停車させるなどです。
ソフトの例を書いてみます。
When station_sensor=TRUE, Do train_throttle=OFF,
こんな感じです。
弊社は、その開発を請負うサービスもご提供しております。自動運転したいが、自分では無理を思われる方は、ご相談ください。
2010年6月14日
転車台 サービス線路、アプローチ線路も出来ました
アプローチ線路,サービス線路とも増設して,こんな形になりました。これでスペースは一杯です。メイン路線からアプローチ線路に機関車を持ってきて,ここで電源を切換え,ブリッジ線路と合わせます。ブリッジに機関車を載せて方向転換します。これは自動でなく手動でこまかく動かすのが良さそうです。
2010年6月10日
海外模型の輸入代行 その1!

弊社は、海外鉄道模型メーカ製品の個人輸入代行サービスをご提供しています。英語が苦手、お手持ちのクレジットカードが使えない、クレジットカードを使いたくない、製品添付の英語のマニュアルが分からない、英語での発注・出荷手配が心配、などなどの理由で、海外の模型に興味はあるが手に入れられない方々へのサービスです。日本の海外模型代理店でご希望の製品が見つかれば宜しいのですが、ご希望の製品が提供されていない場合も多々あります。そんなとき、一度弊社にご相談ください。メーカはもとより、世界中のディーラーとコンタクトしてお探しします。
2010年6月7日
PCで自動運転 その28!ソフト編1(画面)

今回から,PCで自動運転するためのアプリケーションソフトについてご説明します。ハードの準備は大丈夫ですか?まずは,監視制御を担当するPCの画面を見ていただきます。画面上には通常,Quick Keys(左上),速度制御(左下),センサー状態(左下),レイアウト上での走行状態,ポイント状態(右)を表示させると便利です。何を表示させるかは自由に選べます。この画面からマウスの右,左クリックでコントロールします。
2010年5月30日
もうすぐ父の日!



もうすぐ父の日です。弊社では,マウスパッド,マグカップ,コースターに,弊社名誉会長ピース君やC57-135をプリントしたオリジナル製品をもらいました。お気づきかと思いますが,C57-135の画像は,弊社ホームページの背景画像に使っているものです。この写真のピース君は一時期,ブログのプロフィールにデビューしておりました。
2010年5月29日
PCで自動運転 その27!ハード編7(配線)

センサー、ポイント切替回路、速度モジュール、リレー・センサーモジュール、トランス、PCを含む総合接続図をご覧ください。写真は鮮明ではありませんが、概要はお分かりいただけます。画像を左ダブルクリックすると、拡大表示されます。詳細は、メールにてお問い合わせ下さい。
support@peace-company-llc.com
2010年5月24日
転車台 配線中です!


転車台システムのサービス線路と,アプローチ線路に配線を施しました。これらの配線は,転車台コントローラと連動して全体を制御するシステムBOX(企画中)に繋ぎます。システムBOXは,アプローチ→転車台への登載と回転→サービス線路(または,その逆)へと,機関車をメイン路線に出し入れする動作を制御するシステムです。
2010年5月20日
PCで自動運転 その26!ハード編6(センサー信号)
センサーは、自動運転の目であり、耳でもあります。センサーのタイプにより留意すべき点をご説明しましたところ、皆様から”自動運転は大変だなぁ!?”とのコメントを沢山いただきました。でも大丈夫です。CTI社のシステムでは、ソフトや設定で、この難題を簡単に片付けてくれます。
Bouncing(リードスイッチのチャタリング),Car Gaps(連結部でのON/OFF),Dirty Track(電流検知でのレール汚れ対策)という設定機能を使えば、積分型フィルターやその程度を調整できますので、ハード上の対応は一切必要ありません。また透過型フォトセンサーの論理を反転することも可能です。
Bouncing(リードスイッチのチャタリング),Car Gaps(連結部でのON/OFF),Dirty Track(電流検知でのレール汚れ対策)という設定機能を使えば、積分型フィルターやその程度を調整できますので、ハード上の対応は一切必要ありません。また透過型フォトセンサーの論理を反転することも可能です。
2010年5月12日
PCで自動運転 その25!ハード編5(電流検知)
電流検知は,レールに流れる電流とその方向で,編成の位置や動きを検知します。 また他のセンサーのように線路に物理的なもの(ブラケット,リードスイッチなど)を必要としませんので,ジオラマの雰囲気を壊すことはありません。ただし電流を検知するモジュールとセンサー入力回路が必要となります。編成が停車していても,動かないレベル((約1.2V)で電源を供給しますので,そこに編成が居るかどうかは判断できます(速度制御モジュールを使ったケース)。
2010年5月8日
PCで自動運転 その24!ハード編4 センサー



編成の位置検知には、ご紹介したような色々なセンサーが使われます。それぞれのセンサーには特徴があり、ハード、ソフト面で配慮が必要となります。
1.リードスイッチ
接点がON/OFFするときのチャタリングを取り除いて信号とします。停止時の惰性でセンサーを通過してしまいますと、静的には”編成なし”の検知となります。
2.透過型フォトセンサー
編成が通過する時に、信号がOFFとなるので、信号の論理を逆にします。また車両の連結部では、一時的にON/OFFにますので、積分型フィルターで、1編成通過で、1回だけのON/OFF信号とします。また編成が停止したとき、センサーが連結部に位置するとフィルターしても、時間とともに信号が反転しますので、静的には”編成なし”の検知となります。
3.電流検知
閉塞区間でのレールに流れる電流と方向を検知しますが、室内灯、テールランプにも反応しますので、ここにも積分型のフィルターが必要です。またレールの汚れで一時的に電流が流れないことへも対策が要ります。
お問い合わせ、ご意見は、メールでお気軽にどうぞ!
support@peace-company-llc.com
2010年5月4日
PCで自動運転 その23!ハード編3(閑話休題)
鉄道模型の電源は,今はHO,Nゲージとも12ボルトDC電源が当たり前のように使われています。でも3線式Oゲージ(32ミリの線路の中央に,電源供給用の第3線路がある)では,当初AC電源が使われていました。家庭や工場への電力供給では,極性が問題にならないAC電源が一般的ですが,AC交流は土地などのインダクタンスが抵抗となり送電ロスをもたらせます。技術的にはDC送電が理想的です。AC送電(送電ロス)とDC送電(変換ロス:発電がACですのでDCへ変換する必要がある)には一長一短があります。鉄道模型では,編成の走行方向をレールへの電源極性変更で行えるDCが便利です。ただしギャップを設けて,複数の電源が使われ,コモングランド(2線のうち,一つを絶縁してない)を使うと,ポイント部や,転車台,ギャップ前後でショートや無給電状態が発生する可能性がありますのでレイアウト設計では細心の注意が必要です。

2010年5月3日
PCで自動運転 その22!ハード編2
レイアウト設計では,ギャップとフィーダの設置が重要です。ギャップは実鉄道と同じで閉塞区間を構成するものです。”この区間に編成がいるかどうか,どちらの方向に進んでいるか”を検知するためのものです。これは信号機を制御するためにも必要ですし,Cab Control(1路線に複数編成を走らせる)では,1つの編成の前に”進むスペース”(他の編成と衝突しない)が有るかどうかを判断するためにも必要となります。技術的には,レールへの電源供給を,他の部分から絶縁するだけのことです。ポイント前後とギャップ区間に正しく電源を供給するためにフィーダーを設置します。
2010年4月30日
PCで自動運転 その21!ハード編1





まずハード編をご説明していきます。このブログで写真で示すいくつかのモジュールをご紹介してきました。PCは,Windows98以上なら大丈夫です。CTI社の製品が基本ですが,それをうまく使うには,レイアウト設計が重要です。いつでもレイアウトを変更できる場合は,進展とともにレイアウトを変更していくと良いのですが,ジオラマで固定的にする場合は,最初の設計に注意をお払いください。
写真上から順に,
速度制御モジュール(1路線用)
ポイント切換回路(6回路用,自作)
リレー/センサー回路(各4回路)
電流検知モジュール(2回路入り)
USBコンバータ
です。
2010年4月26日
PCで自動運転 その20!どう実現するのか?全体編
PC自動運転を”どう実現するか?”シリーズです 今回は全体編です。 弊社はCTI社のシステムを活用していますので,それに基づきご紹介します。
PCによる自動運転を実現するには,ハードとアプリケーションソフト(以降ソフト)が必要です。
ハードでは,
1.リレー,トランジスターON/OFF回路やセンサー入力回路
2.速度制御
3.ポイント切換
4.信号,駅舎点灯制御
5.ギャップ,フィーダー,編成位置検知
などの準備が必須です。
ソフトでは,
1.レイアウト/編成/信号機の画面表示
2.PC画面からの制御
3.自動運転ソフト
4.初期設定
5.緊急時処置
6.自動運転と手動運転の切り分け
などを開発します。
レイアウトやハードは,お客様ごとに異なりますので,それぞれ独自のハード/ソフトの開発が必要となります。
PCによる自動運転を実現するには,ハードとアプリケーションソフト(以降ソフト)が必要です。
ハードでは,
1.リレー,トランジスターON/OFF回路やセンサー入力回路
2.速度制御
3.ポイント切換
4.信号,駅舎点灯制御
5.ギャップ,フィーダー,編成位置検知
などの準備が必須です。
ソフトでは,
1.レイアウト/編成/信号機の画面表示
2.PC画面からの制御
3.自動運転ソフト
4.初期設定
5.緊急時処置
6.自動運転と手動運転の切り分け
などを開発します。
レイアウトやハードは,お客様ごとに異なりますので,それぞれ独自のハード/ソフトの開発が必要となります。
2010年4月23日
機関庫側もレール敷設始まりました!

アプローチ側に続いて,機関庫側もレールの敷設を開始しました。機関庫と転車台の間のレールにも,コルク道床と枕木が取り付きました。3つの線路とも,転車台と一直線で走行でき,かつ同じ高さにします。
2010年4月20日

2010年4月19日
転車台とPC自動運転システム!

弊社は将来,自動運転しているシステム(複線入れ替え)と,ご案内しております転車台システムを接続することを計画しています。レイアウト構想図は写真のように考えています。構想には編成ごと方向転換するWYEを入れました。自動運転でやることと,手動に切り替えて制御する部分(例えば転車台,WYE)をうまく繋ぎ,楽しみたいと思っています。何年掛かっても実現したいです。
2010年4月8日
PCで自動運転 その19!PCで何ができるか?
今まで”PCで自動運転”をご紹介してきましたが,PCで何ができるか?まとめてみました。どうすればできるか?は,今後の連載となります。本当には書き切れないほどのことが出来ますので,ほんの一部としてご紹介します。
1.時刻ダイヤに従って定時自動運転
2.自分のレイアウトを画面に表示して,状況を確認しながら,自動運転
3.ポイント,信号機,踏切,駅舎の点灯などのPCからの制御(自動,手動)
4.編成を好みの速度で動かす
5.乱数を使って,定形でない運転走行を行う
6.自分のレイアウトで,色や形で編成の位置や状況を表示させる
7.PC画面から直接,ポイントや,運行速度,運行方向指示する
8.CabControl(1路線上に,複数編成を走らせる)
9.。。。。
いかがですか?アイデア次第でもっともっとPCで自動運転できます。
PCは専用では必要ありませんので,自動運転以外にいつもの業務もできます。
お気軽にメールでお問い合わせください。
support@peace-company-llc.com
1.時刻ダイヤに従って定時自動運転
2.自分のレイアウトを画面に表示して,状況を確認しながら,自動運転
3.ポイント,信号機,踏切,駅舎の点灯などのPCからの制御(自動,手動)
4.編成を好みの速度で動かす
5.乱数を使って,定形でない運転走行を行う
6.自分のレイアウトで,色や形で編成の位置や状況を表示させる
7.PC画面から直接,ポイントや,運行速度,運行方向指示する
8.CabControl(1路線上に,複数編成を走らせる)
9.。。。。
いかがですか?アイデア次第でもっともっとPCで自動運転できます。
PCは専用では必要ありませんので,自動運転以外にいつもの業務もできます。
お気軽にメールでお問い合わせください。
support@peace-company-llc.com
アプローチ線路写真 拡大しました

ピントがあやしいですが,アプローチ線路と転車台リブの関係を拡大してみました。転車台のブリッジレールとアプローチ線路の間には,1.5ミリのギャップが要求されていますが,ブリッジを1周回転させると,結構ギャップに凹凸があるようです。アプローチレールの受け口は,4ミリくらい斜めにヤスって,車輪が収まりやすいようにします。
2010年4月7日
アプローチ線路の高さ,合いました!

アプローチ線路は,コルクの道床5ミリの上に,PECOのコード83のレールを持ったフレキシブルを使いました。写真でご覧いただけるように,何とかレール高さが転車台リブの高さと合いました。高さの調整は慎重にしないと脱線しますので,神経を使いました。
2010年4月4日
線路を敷設しています

機関庫の3路線に線路を敷設しています。転車台までの距離と高さがポイントです。アプローチ線路には,5ミリの道床コルクの上にフレキシブルレールを使いました。機関庫内は,枕木を使わないので,レール単体を取り付けます。今は位置合せ段階です。後で転車台と機関庫の間の線路も道床と枕木を取り付けます。
2010年3月29日
PCで自動運転 その18!レイアウト表示

ご自分のレイアウトと運行状態を画面でご覧いただけます。ポイント,編成の現在場所,信号機など,現在の状態に合わせた形で表示ができますので,難しいスイッチ,ランプの監視盤が手軽にPC上で表現できます。電源の供給状態は色で表示します。弊社レイアウトでは,4つのポイントを設置しておりますが,自動的に切り替えることもできますし,手動で切り替えることも出来ます,今どんな状態になっているかは,PCの画面で確認できます。またマウスをPC画面上に持っていけば,画面から直接ポイントを切り替えることが出来ます。編成位置検出センサーの状態も画面に表示されています。
2010年3月20日
PCで自動運転 その17!画面表示3 まとめて制御

個別にPCの画面を紹介してきましたが,この写真をご覧下さい。自分で名前を付けたボタンを使い,マウスの右クリックと左クリックを使うことで自由に編成を走らせることが出来ます。 そのためにはすこしだけ英語を使ってプログラムする必要があります。でもとても便利ですし,弊社も愛用しています。英語的だからと言って何も難しくはありません。難しいとお思いなら弊社が支援いたします。
Start:自分の組み込んだソフトに従い,自動運転します。
F/r:機関車の動く方向を前か後に変えます。
Change:内線と外線をよいタイミングで,編成を入れ替えます。
Switch1~4:4つのポイントを手動で切り替えます。
Stop:編成を所定の位置で停止させます。
2010年3月16日
PCで自動運転 その16! 画面表示2

コントロールはPCから手動でON/OFF出来ます。センサーはPC画面上に常に状態(ON/OFF)が表示されます。PCで専用言語を使って,どのコントロールか,どのセンサーかを名付ければPCで監視制御できます。簡単です。この写真ではフォトセンサー(駅で停車するための”Station_in”)と,電流検知(編成がどちら方向に動いているか,どこに居るかを示す”West”,”East”)が表示されています。
2010年3月10日
PCで自動運転 その15!画面表示1

PCの画面には,制御状態,センサー状態,信号の状態,ポイントのON/OFF,機関車の位置など自分のレイアウトと状況に基づいて自由に表示が選べます。今回ご紹介する画面は,4個あるポイントの状態をしめすものです。画面中”Switch1~4”が緑か赤かでどちらに設定されているか判ります。
登録:
コメント (Atom)



